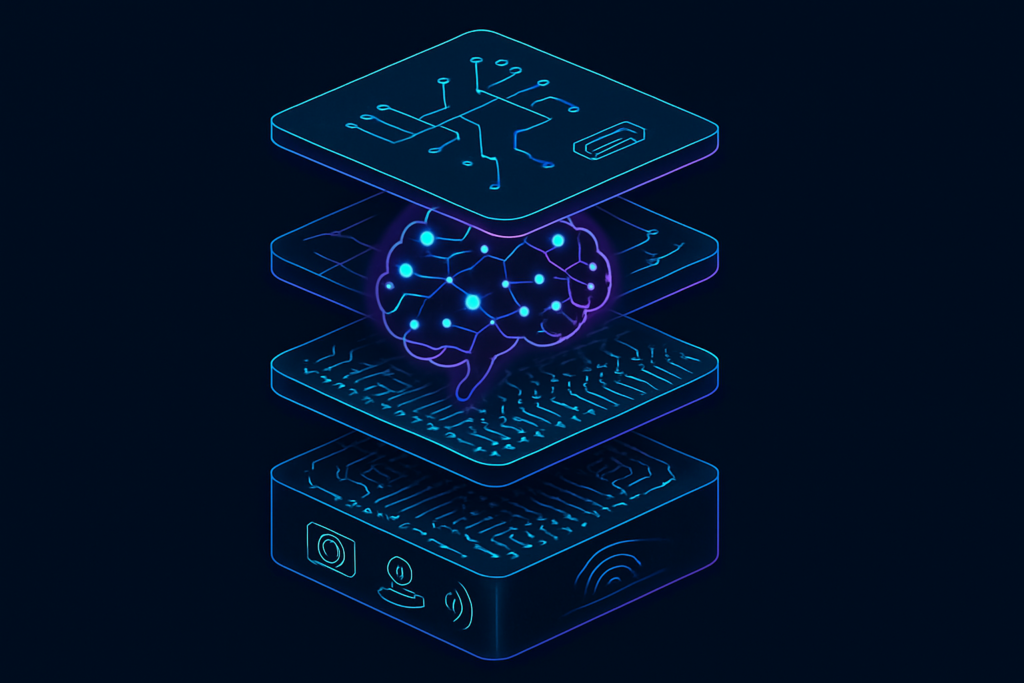
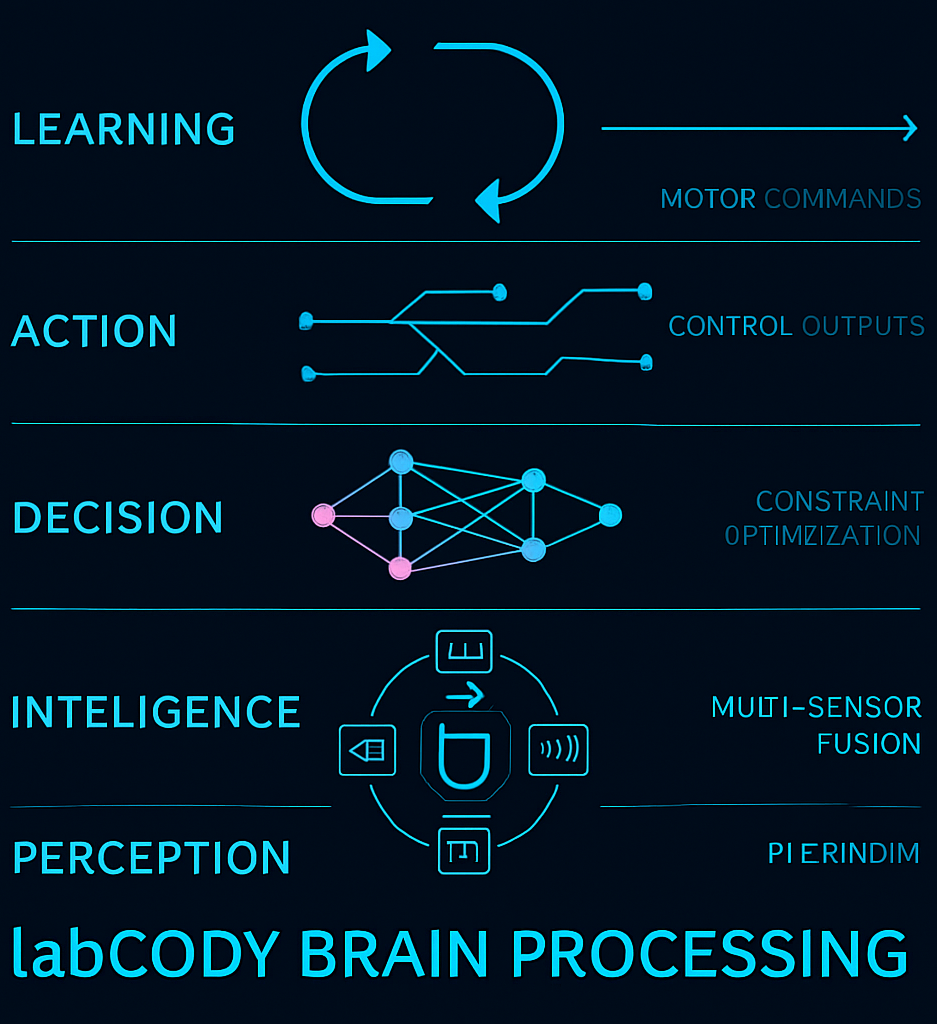
Layer 1: Perception
Multi-sensor fusion combines camera, LiDAR, radar, IMU, and contextual data into unified environmental understanding.
Layer 2: Intelligence
Custom neural networks and reasoning systems process perception data to understand state, predict outcomes, and evaluate options.
Layer 3: Decision
Constraint-based optimization and control systems select optimal actions based on mission objectives, safety requirements, and operational constraints.
Layer 4: Action
Execution layer translates decisions into motor commands, system controls, and communication protocols.
Layer 5: Learning
Continuous feedback loop captures operational data, identifies patterns, and updates models to improve future performance.